![]() Трехпозиционный регулятор (PREG)
Трехпозиционный регулятор (PREG)
![]() Показатели качества регулирования (QREG)
Показатели качества регулирования (QREG)
![]() Переключение с динамической балансировкой (SSWT)
Переключение с динамической балансировкой (SSWT)
![]() Адаптивное регулирование (APID)
Адаптивное регулирование (APID)
![]() Блок адаптивного регулирования (APDD)
Блок адаптивного регулирования (APDD)
![]() Настройка PID-закона по параметрам объекта (CALC)
Настройка PID-закона по параметрам объекта (CALC)
![]() Настройка PID-закона по скачку сигнала задания (RJMP)
Настройка PID-закона по скачку сигнала задания (RJMP)

Этот блок формирует выходное значение по ПИД-закону от величины, поданной на вход INP:

где i – текущий такт пересчета, KP,
KD и KI – соответственно коэффициенты при
пропорциональной, дифференциальной и интегральной
составляющих,  – период пересчета
блока в секундах (длительность такта).
– период пересчета
блока в секундах (длительность такта).
Модуль подаваемого на вход KI отрицательного значения передается на выход. Далее при подаче на вход KI неотрицательного значения регулирование начинается с установленной величины.
Для ограничения величины управляющего воздействия используются входы блока MIN и MAX. Если величина управления меньше MIN, то Q = MIN, если величина управления больше MAX, то Q = MAX, при этом в обоих случаях накопление интегральной составляющей закона регулирования прекращается.
Данный блок вычисляет величину управляющего воздействия по значению рассогласования регулируемой величины и задания, которое предварительно надо вычислять с помощью блока X-Y.
Введение в алгоритм параметра  исключает необходимость пересчета настроек
регулятора при смене периода пересчета.
исключает необходимость пересчета настроек
регулятора при смене периода пересчета.

Данный блок представляет собой PID-регулятор с возможностью модифицирования алгоритма и имеет, относительно блока PID, дополнительные входы MODE и IN2 и дополнительный выход dQk = Q*k– Qk-1 (Q*k – вычисленное значение на данном такте пересчета, Qk-1– значение выхода Q на предыдущем такте пересчета).
Биты MODE имеют следующее назначение:
![]() бит 0 (0x1) и бит 1 (0x2) – установка бита 0 или
бита 1 запрещает увеличение интегральной составляющей, при
этом:
бит 0 (0x1) и бит 1 (0x2) – установка бита 0 или
бита 1 запрещает увеличение интегральной составляющей, при
этом:
![]() если установлен бит 0 и dQ <= 0, то
Q = Q*
если установлен бит 0 и dQ <= 0, то
Q = Q*
![]() если установлен бит 0 и dQ > 0, то
Q = Qk-1
если установлен бит 0 и dQ > 0, то
Q = Qk-1
![]() если установлен бит 1 и dQ >= 0, то
Q = Q*
если установлен бит 1 и dQ >= 0, то
Q = Q*
![]() если установлен бит 1 и dQ < 0, то
Q = Qk-1
если установлен бит 1 и dQ < 0, то
Q = Qk-1
![]() бит 2 (0x4) – если установлен, dQ
клиппируется по такому же механизму, что и Q при
установленном бите 12 (см. описание бита 12). Сначала проверяется
Q, потом – dQ;
бит 2 (0x4) – если установлен, dQ
клиппируется по такому же механизму, что и Q при
установленном бите 12 (см. описание бита 12). Сначала проверяется
Q, потом – dQ;
![]() бит 3 (0x8) – см. описание бита 12;
бит 3 (0x8) – см. описание бита 12;
![]() бит 4 (0x10) – если установлен, блок умножает
рассогласование на входе INP на 0.5 в том случае, если
INP>50 и на предыдущем такте пересчета
INP<>0;
бит 4 (0x10) – если установлен, блок умножает
рассогласование на входе INP на 0.5 в том случае, если
INP>50 и на предыдущем такте пересчета
INP<>0;
![]() бит 5 (0x20) – установка этого бита разрешает
использование зоны нечувствительности (zone). Зона
нечувствительности определяется по формуле zoneni
= kn *
MAXi.
Коэффициенты kn (индекс
n = 0…15 задается значением полубайта 5 (0xF00000)
MODE) имеют предустановленные значения
(k0=0.01;
k1=0.001;
k2=0.0001;
k3=0.002;
k4=0.003;
k5=0.005;
k6=0.0002;
k7=0.0003;
k8=0.0005;
k9=0.2;
k10=0.3;
k11=0.4;
k12=0.5;
k13=0.01;
k14=1;
k15=10),
которые могут быть изменены с помощью ключей
PIDDZN<nn> в файле *.cnf (см. Задание параметров работы мониторов
). По умолчанию используется k0 (изменять
значение этой переменной не рекомендуется);
бит 5 (0x20) – установка этого бита разрешает
использование зоны нечувствительности (zone). Зона
нечувствительности определяется по формуле zoneni
= kn *
MAXi.
Коэффициенты kn (индекс
n = 0…15 задается значением полубайта 5 (0xF00000)
MODE) имеют предустановленные значения
(k0=0.01;
k1=0.001;
k2=0.0001;
k3=0.002;
k4=0.003;
k5=0.005;
k6=0.0002;
k7=0.0003;
k8=0.0005;
k9=0.2;
k10=0.3;
k11=0.4;
k12=0.5;
k13=0.01;
k14=1;
k15=10),
которые могут быть изменены с помощью ключей
PIDDZN<nn> в файле *.cnf (см. Задание параметров работы мониторов
). По умолчанию используется k0 (изменять
значение этой переменной не рекомендуется);
В DOS zone = 1 всегда.
![]() бит 6 (0x40) – если установлен, значение выхода
dQ сглаживается по формуле dQk = 0.5 *
(dQk-1
+ dQ*k);
бит 6 (0x40) – если установлен, значение выхода
dQ сглаживается по формуле dQk = 0.5 *
(dQk-1
+ dQ*k);
![]() бит 7 (0x80) – если установлен, Q
сглаживается по формуле Qk = 0.5 *
(Qk-1
+ Q*k);
бит 7 (0x80) – если установлен, Q
сглаживается по формуле Qk = 0.5 *
(Qk-1
+ Q*k);
![]() бит 8 (0x100) – установка этого бита переводит
блок в ручной режим (Q = IN2); при последующем
переходе в автоматический режим регулирования (бит 8 равен 0)
скачок управляющего воздействия (Q) сглаживается.
бит 8 (0x100) – установка этого бита переводит
блок в ручной режим (Q = IN2); при последующем
переходе в автоматический режим регулирования (бит 8 равен 0)
скачок управляющего воздействия (Q) сглаживается.
Если установлены биты 8 (0x100) и 10 (0x400), то Q = IN2, но при последующем переходе в автоматический режим регулирования скачок управляющего воздействия (Q) не сглаживается;
![]() бит 9 (0x200) – если установлен, Q =
Q* +
IN2, где Q* –
значение, вычисленное по PID-закону;
бит 9 (0x200) – если установлен, Q =
Q* +
IN2, где Q* –
значение, вычисленное по PID-закону;
![]() бит 10 – см. описание бита 8;
бит 10 – см. описание бита 8;
![]() бит 11 (0x800) – если установлен, интегральная
составляющая PID-закона обнуляется;
бит 11 (0x800) – если установлен, интегральная
составляющая PID-закона обнуляется;
![]() бит 12 (0x1000) – если установлен, интегральная
составляющая фиксируется (запрещается ее изменение), а Q
лежит в диапазоне [MINi,
MAXi] (при
выходе за границы Q клиппируется; индекс i = 0…15
задается значением полубайта 4 (0xF0000) MODE). Константы
MAXi имеют
предустановленные значения (MAX0=100;
MAX1=0.1;
MAX2=1;
MAX3=10;
MAX4=1000;
MAX5=10000;
MAX6=0.5;
MAX7=5;
MAX8=50;
MAX9=150;
MAX10=500;
MAX11=5000;
MAX12=50000;
MAX13=100;
MAX14=0.01;
MAX15=3660),
которые могут быть изменены с помощью ключей
PIDLIM<nn> в файле *.cnf (см. Задание параметров работы мониторов
). Константы MINi
вычисляются по соответствующим MAXi:
бит 12 (0x1000) – если установлен, интегральная
составляющая фиксируется (запрещается ее изменение), а Q
лежит в диапазоне [MINi,
MAXi] (при
выходе за границы Q клиппируется; индекс i = 0…15
задается значением полубайта 4 (0xF0000) MODE). Константы
MAXi имеют
предустановленные значения (MAX0=100;
MAX1=0.1;
MAX2=1;
MAX3=10;
MAX4=1000;
MAX5=10000;
MAX6=0.5;
MAX7=5;
MAX8=50;
MAX9=150;
MAX10=500;
MAX11=5000;
MAX12=50000;
MAX13=100;
MAX14=0.01;
MAX15=3660),
которые могут быть изменены с помощью ключей
PIDLIM<nn> в файле *.cnf (см. Задание параметров работы мониторов
). Константы MINi
вычисляются по соответствующим MAXi:
![]() если бит 3 (0x8) не установлен,
MINi =
-MAXi;
если бит 3 (0x8) не установлен,
MINi =
-MAXi;
![]() если бит 3 (0x8) установлен,
MINi = 0.
если бит 3 (0x8) установлен,
MINi = 0.
По умолчанию используется MAX0 (изменять значение этой переменной не рекомендуется);
В DOS MAX = 100 и MIN = -100 всегда.
![]() бит 14 (0x4000) – установка этого бита запрещает
изменение интегральной составляющей;
бит 14 (0x4000) – установка этого бита запрещает
изменение интегральной составляющей;
![]() бит 15 (0x8000) – если установлен,
дифференциальная составляющая считается, но не участвует в
формировании выхода.
бит 15 (0x8000) – если установлен,
дифференциальная составляющая считается, но не участвует в
формировании выхода.
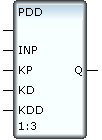
Этот блок формирует выходное значение по ПДД-закону от значения входа INP:
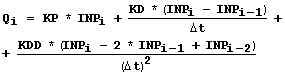
где i – текущий такт пересчета, KP и
KD – соответственно коэффициенты при пропорциональной и
дифференциальной составляющих, KDD – коэффициент при второй
производной,  – период пересчета
блока в секундах (длительность такта).
– период пересчета
блока в секундах (длительность такта).
Данный блок вычисляет величину управляющего воздействия по значению рассогласования регулируемой величины и задания, которое предварительно надо вычислять с помощью блока X-Y. Все дополнительные функции контура также программируются с помощью отдельных блоков.
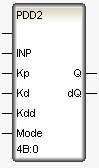
Данный блок, относительно блока PDD, имеет дополнительный вход MODE и дополнительный выход dQk = Q*k– Qk-1 (Q*k – вычисленное значение на данном такте пересчета, Qk-1– значение выхода Q на предыдущем такте пересчета).
![]() если MODE = 1 и dQ <= 0, то
Q = Q*;
если MODE = 1 и dQ <= 0, то
Q = Q*;
![]() если MODE = 1 и dQ > 0, то
Q = Qk-1;
если MODE = 1 и dQ > 0, то
Q = Qk-1;
![]() если MODE = 2 и dQ >= 0, то
Q = Q*;
если MODE = 2 и dQ >= 0, то
Q = Q*;
![]() если MODE = 2 и dQ < 0, то
Q = Qk-1;
если MODE = 2 и dQ < 0, то
Q = Qk-1;
![]() если установлен бит 7 MODE (0x80), Q
сглаживается по формуле Qk = 0.5 *
(Qk-1
+ Q*k);
если установлен бит 7 MODE (0x80), Q
сглаживается по формуле Qk = 0.5 *
(Qk-1
+ Q*k);
![]() если установлен бит 8 MODE (0x100), блок
переходит в ручной режим, при этом Q=INP;
если установлен бит 8 MODE (0x100), блок
переходит в ручной режим, при этом Q=INP;
![]() если установлен бит 12 MODE (0x1000),
Q клиппируется при выходе из диапазона [-100,+100]. При этом
интегральная составляющая также ограничивается, и адекватно
корректируется dQ;
если установлен бит 12 MODE (0x1000),
Q клиппируется при выходе из диапазона [-100,+100]. При этом
интегральная составляющая также ограничивается, и адекватно
корректируется dQ;
![]() если установлен бит 15 MODE (0x8000),
дифференциальная составляющая не учитывается.
если установлен бит 15 MODE (0x8000),
дифференциальная составляющая не учитывается.
Трехпозиционный регулятор (PREG)

Этот блок сигнализирует о выходе контролируемой величины, подаваемой на вход INP, за границы диапазона [MIN, MAX]. Блок может быть использован в программе, с помощью которой значение некоторого сигнала удерживается в заданном диапазоне. Вход DLT блока предназначен для задания величины гистерезиса на отключение сигналов управления QL и QH.
Блок работает по следующему алгоритму. Пока INP не выходит за границы диапазона [MIN, MAX], QL = QH = 0. Если INP > MAX, выход QL принимает значение 1, которое сбрасывается в 0 только после того, как INP станет меньше (MAX - DLT). Аналогично, если INP < MIN, выход QH принимает значение 1, которое сбрасывается в 0 только после того, как INP станет больше (MIN + DLT).

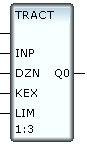
Данный блок моделирует объект управления для отладки алгоритмов регулирования или подготовки демонстрационных проектов. Он представляет собой комбинацию апериодического (инерционного) звена первого порядка и звена запаздывания, т.е. передаточная функция блока (при входной функции est) имеет вид:

где k и T – соответственно коэффициент усиления и постоянная времени инерционного звена первого порядка, l > 0 – время запаздывания.
Кроме того, на выходной сигнал блока можно наложить помеху в виде случайной составляющей, синусоидального сигнала или случайных бросков. Здесь же можно задать случайное колебание динамических характеристик объекта.
Входным по отношению к моделируемому объекту является вход INP. Входы K, T и N используются для задания соответственно коэффициента усиления, постоянной времени и времени запаздывания. Последние два параметра задаются в тактах пересчета, максимальное значение времени запаздывания – 4.
Вход SNS предназначен для управления случайными помехами, вносимыми в работу объекта. Значение 1 отдельных битов этого входа включает следующие помехи:
![]() 1 бит – добавление к выходному сигналу случайной
величины в диапазоне от 0 до 1%;
1 бит – добавление к выходному сигналу случайной
величины в диапазоне от 0 до 1%;
![]() 2 бит – формирование пика величиной 25% от
значения выхода с вероятностью 0,01;
2 бит – формирование пика величиной 25% от
значения выхода с вероятностью 0,01;
![]() 3 бит – добавление к выходу синусоидального
сигнала с амплитудой 2% от значения выхода;
3 бит – добавление к выходу синусоидального
сигнала с амплитудой 2% от значения выхода;
![]() 5 бит – случайное увеличение коэффициента усиления
в диапазоне от 0 до 2%;
5 бит – случайное увеличение коэффициента усиления
в диапазоне от 0 до 2%;
![]() 6 бит – случайное увеличение постоянной времени в
диапазоне от 0 до 2%;
6 бит – случайное увеличение постоянной времени в
диапазоне от 0 до 2%;
![]() 7 бит – случайное изменение на 1 запаздывание.
7 бит – случайное изменение на 1 запаздывание.
Первые три помехи добавляются к выходу блока после формирования его нового значения. Динамические характеристики объекта (последние три помехи) корректируются до пересчета блока.
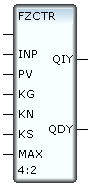
Данный функциональный блок реализует функцию нечеткого регулятора. На вход INP подается регулируемое значение. Вход PV предназначен для задания уставки.
На выходе QIY блока формируется величина управляющего воздействия. Выход QDY используется для вывода величины приращения управляющего воздействия на текущем пересчете блока.
Значения выходов формируются по следующему алгоритму:
QIYi = QIYi-1 + QDYi
QDYi = kg * QDYg + kn * QDYn + ks * QDYs
где
i – текущий такт пересчета,
kg, kn и ks – принадлежность рассогласования к категориям "большое", "среднее" и "малое" соответственно;
QDYg, QDYn, QDYs – приращение управления по условию "большое", "среднее" и "малое" отклонение соответственно.
Приращения по каждой из категорий отклонения рассчитываются по следующей формуле:
QDYj = Kj * SIGN(PV - INP)
где j – признак категории рассогласования:
g – сильное рассогласование;
n – среднее рассогласование;
s – слабое рассогласование.
Коэффициенты Kj настраиваются входами KG, KN и KS данного блока. Если эти коэффициенты не заданы, то их значения принимаются по умолчанию равными 0.3, 0.2 и 0.05 соответственно.
Вход MAX ограничивает величину приращения управляющего воздействия. Это ограничение вычисляется как произведение данного входа и рассогласования задания и регулируемого значения.
На рисунке демонстрируется подход к определению коэффициентов принадлежности к интервалам рассогласования.
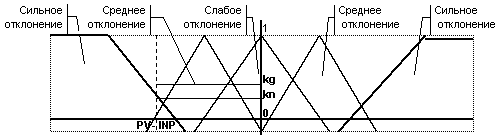
Границы диапазонов категорий рассогласования задаются с помощью блока SFZ. Он передает свои настройки всем нечетким регуляторам данного узла. Поэтому этот блок следует разместить перед каждым регулятором, имеющим индивидуальные настройки.
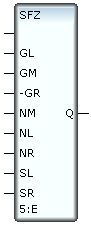
Данный блок предназначен для настройки диапазонов нечеткого регулятора, реализованного в функциональном блоке FZCTR.
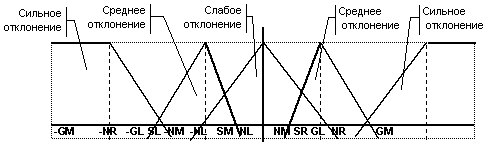
Обозначенные на рисунке границы диапазонов настраиваются одноименными входами данного блока (на входе блока задается модуль значения). Если этот блок не использовался, то по умолчанию принимаются следующие значения настроек: GM=1, -GR=-0.5, GL=0.5, NR=0.75, NM=0.5, NL=0.02, SR=0.25, SM=0, SL=-0.25. Выход Q данного блока не используется.
Этот блок следует разместить перед каждым регулятором, имеющим индивидуальные настройки. Блок SFZ должен выполняться перед блоком нечеткого регулятора.
Показатели качества регулирования (QREG)
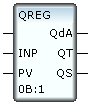
Этот блок предназначен для оценки качества регулирования. На вход INP подается значение регулируемого параметра, на вход PV – задание. На выходах формируются следующие значения:
![]() QdA – максимум абсолютного значения
рассогласования (первый скачок при изменении задания
исключается);
QdA – максимум абсолютного значения
рассогласования (первый скачок при изменении задания
исключается);
![]() QT – количество тактов с момента изменения
задания, на которых рассогласование превышало 1% задания;
QT – количество тактов с момента изменения
задания, на которых рассогласование превышало 1% задания;
![]() QS – накапливающаяся сумма модуля
рассогласования. При суммировании не учитываются значения меньше
0.5%.
QS – накапливающаяся сумма модуля
рассогласования. При суммировании не учитываются значения меньше
0.5%.
При изменении задания (PV) выходы обнуляются.
Это блок позволяет реализовать ряд функций по обработке входного сигнала, подаваемого на вход INP. К ним относятся:
![]() зона нечувствительности;
зона нечувствительности;
![]() экспоненциальное сглаживание;
экспоненциальное сглаживание;
![]() ограничение значения.
ограничение значения.
Для настройки этих функций используются три входа. На вход DZN подается величина зоны нечувствительности, на вход KEX – величина коэффициента сглаживания, на вход LIM – ограничение на абсолютное значение.
Переключение с динамической балансировкой (SSWT)
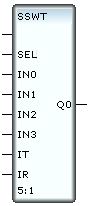
Функцией этого блока является реализация безударной коммутации его входов IN0, ... IN3 на выход Q0. Номер входа, коммутируемого на выход, задается входом SEL.
При каждом изменении значения входа SEL включается алгоритм динамической балансировки. При этом значение выхода вычисляется по следующей формуле:
Qi = IN<N>i-1 * (1 – IT) + Qi-1 * IT
где
i – текущий такт пересчета;
N – номер коммутируемого входа;
IT – значение входа управления инерционностью. Это значение должно удовлетворять условию 0 <= IT < 1;
После того как в первый раз выполнится условие Q – IN<N> < IR, алгоритм динамической балансировки отключается, и в дальнейшем значение выбранного входа просто копируется на выход Q0.
Адаптивное регулирование (APID)
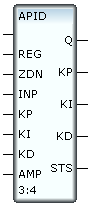
Данный блок позволяет организовать регулирование по PID-закону с автоматическим вычислением настроек регулятора.
В инструментальной системе работа блока адаптивного регулирования поддерживается только в отладчике программ. Для использования этого алгоритма в реальном времени требуется Adaptive Control МРВ, Adaptive Control Double Force МРВ или Adaptive Микро TRACE MODE с поддержкой данной функции.
Входы и выходы блока
Блок APID имеет семь функциональных входов и пять выходов. Входы имеют следующее назначение:
REG – вход управления, его значение определяет следующие режимы работы блока:
![]() 0 – регулирование с использованием настроек,
поданных на входы KP, KI и KD;
0 – регулирование с использованием настроек,
поданных на входы KP, KI и KD;
![]() 1 – вычисление настроек регулятора;
1 – вычисление настроек регулятора;
![]() 2 – сброс всех результатов вычислений (значения
настроек на выходах блока, критическая частота и амплитуда
генератора);
2 – сброс всех результатов вычислений (значения
настроек на выходах блока, критическая частота и амплитуда
генератора);
![]() 3 – сброс критической частоты и амплитуды;
3 – сброс критической частоты и амплитуды;
![]() 4 – установка режима нефорсированного управления,
т.е. изменение задания не отрабатывается в пропорциональной и
дифференциальной составляющих. В этом случае переходный процесс
более затянут, но сокращается величина динамической погрешности. По
умолчанию регулятор работает в этом режиме;
4 – установка режима нефорсированного управления,
т.е. изменение задания не отрабатывается в пропорциональной и
дифференциальной составляющих. В этом случае переходный процесс
более затянут, но сокращается величина динамической погрешности. По
умолчанию регулятор работает в этом режиме;
![]() 5 – установка режима форсированного управления,
т.е. при смене задания произойдет скачок по управлению;
5 – установка режима форсированного управления,
т.е. при смене задания произойдет скачок по управлению;
![]() 6 – непрерывное вычисление настроек регулятора с
плавным переходом от старых значений к новым. В этом режиме
определение текущих настроек и их введение в регулятор происходит
автоматически. Значения настроек постоянно индицируются на выходах
KP, KI, KD;
6 – непрерывное вычисление настроек регулятора с
плавным переходом от старых значений к новым. В этом режиме
определение текущих настроек и их введение в регулятор происходит
автоматически. Значения настроек постоянно индицируются на выходах
KP, KI, KD;
![]() 10 – регулирование с использованием вычисленных
настроек, сформированных на выходах KP, KI и
KD. Отрицательным значением (кратковременно) по входу
REG может быть установлена добротность заграждающих фильтров
в диапазоне 1-50 (по умолчанию 1). Чем выше уровень шума, тем
большее значение добротности рекомендуется устанавливать. При этом
увеличивается и время самонастройки регулятора;
10 – регулирование с использованием вычисленных
настроек, сформированных на выходах KP, KI и
KD. Отрицательным значением (кратковременно) по входу
REG может быть установлена добротность заграждающих фильтров
в диапазоне 1-50 (по умолчанию 1). Чем выше уровень шума, тем
большее значение добротности рекомендуется устанавливать. При этом
увеличивается и время самонастройки регулятора;
ZDN – задание;
INP – регулируемый параметр;
KP – коэффициент при пропорциональной составляющей;
KD – коэффициент при дифференциальной составляющей;
KI – коэффициент при интегральной составляющей;
AMP – ограничения на амплитуды. Положительное значение – на амплитуду сигнала, добавляемого к выходу регулятора (по умолчанию 10, минимальная – 4); отрицательное – на колебания выхода объекта (по умолчанию 1, минимальная – 0.5). При старте МРВ значение этого входа должно быть положительным (т.е. вход должен задавать ограничение амплитуды на входе объекта).
На выходах данного блока формируются следующие величины:
Q – величина управляющего воздействия;
KP – коэффициент при пропорциональной составляющей;
KD – коэффициент при дифференциальной составляющей;
KI – коэффициент при интегральной составляющей;
STS – индикатор текущего состояния адаптации.
Величины, подаваемые на входы ZDN, INP и AMP, должны задаваться в процентах (в диапазоне от 0 до 100). Величина управляющего воздействия на выходе Q также формируется в диапазоне от 0 до 100.
Описание работы блока
Критерием вычисления настроек является минимизация среднеквадратичной ошибки регулирования. Для настройки регулятора на вход объекта подается пробный гармонический сигнал. При этом амплитуда колебаний регулируемого параметра удерживается в пределах от 0.3% до 1%. Получаемые настройки минимизируют колебания при переходных процессах.
Реализованный алгоритм является помехоустойчивым. Он работает даже в том случае, если дисперсия шума в несколько раз превышает амплитуду пробных колебаний выходного сигнала. При настройке он исключает появление неустойчивых режимов.
Быстродействие процесса самонастройки алгоритма управления зависит от уровня шумов и неслучайных возмущений, действующих на объект управления.
Если вход REG равен 0 или 10, блок реализует функцию PID-регулятора. В первом случае используются настройки на входах KP, KD и KI, а во втором – на выходах с теми же именами (значения, полученные при адаптации).
Для перехода в режим автонастройки (одноразовое определение оптимальных настроек регулятора) следует установить в 1 значение входа REG. Для перехода в режим непрерывной адаптации (постоянное определение оптимальных настроек регулятора) нужно на вход REG подать значение 6. В обоих случаях регулятор не отключается и процесс управления объектом осуществляется параллельно с процессом настройки регулятора.
Индикатором хода настройки регулятора является величина выхода STS. Он может принимать следующие значения:
0 – настройка завершена (или не запускалась);
1 – настройка регулятора завершена успешно. Получены значения оптимальных настроек;
2…100 – поиск оптимальных настроек. Значение выхода уменьшается от 100 до 1 и показывает близость к завершению работы алгоритма;
101 – невозможно провести адаптацию. Слишком много воздействий на систему или уровень шумов сравним с амплитудой гармоники на выходном сигнале объекта. Следует уменьшить внешние воздействия или попробовать увеличить уровень максимально возможной амплитуды колебаний на выходе объекта;
102 – невозможно провести адаптацию. Не удается достигнуть необходимой амплитуды сигнала на выходе (от 0,3 до 1 максимальной). Следует увеличить амплитуду входа или уменьшить амплитуду выхода;
103 – невозможно провести адаптацию. Границы диапазона изменения управляющего сигнала не дают увеличить амплитуду сигнала на входе объекта. Следует либо изменить амплитуды, либо сместить уровень управляющего воздействия;
104 – невозможно провести адаптацию. Границы диапазона изменения регулируемого параметра не дают увеличить амплитуду сигнала на выходе объекта. Следует повысить ограничение на входную амплитуду или сместить входной сигнал с границ диапазона регулирования;
105 – невозможно провести адаптацию. Следует увеличить частоту пересчета программы.
В случае нормального завершения адаптации (значение 1 на выходе STS) на выходах KP, KD и KI формируются новые значения соответствующих настроек для регулятора. Для их использования надо присвоить входу REG значение 10.
При задании жестких ограничений на амплитуду пробного сигнала алгоритм может сформировать сообщение о невозможности подобрать оптимальные настройки. Минимальное значение амплитуды следует устанавливать с учетом разрядности АЦП, коэффициента усиления и инерционности объекта.
Ограничения на применение
Данный алгоритм настройки PID-регулятора не может быть применён к структурно неустойчивым объектам управления.
Оптимальные настройки вычисляются при соотношении времени запаздывания к постоянной времени объекта не более 0,5.
Период опроса параметра и вызова алгоритма настройки должна быть не менее 0.05 постоянной времени объекта.
Амплитуда колебаний регулируемого параметра (отклик на пробный сигнал) должна быть не ниже 8 единиц кода АЦП. Например, 0.5% для 12-разрядного АЦП составляет 20 единиц.
Блок адаптивного регулирования (APDD)
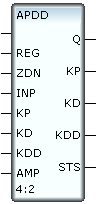
Данный блок позволяет организовать регулирование по PDD-закону с автоматическим вычислением настроек регулятора.
В инструментальной системе работа блока адаптивного регулирования поддерживается только в отладчике программ. Для использования этого алгоритма в реальном времени требуется Adaptive Control МРВ, Adaptive Control Double Force МРВ или Adaptive Микро TRACE MODE с поддержкой данной функции.
Входы и выходы блока
Блок APDD имеет 7 функциональных входов и 5 выходов. Его входы имеют следующее назначение:
REG – вход управления. Значение этого входа определяет следующие режимы работы блока:
![]() 0 – регулирование с использованием настроек,
поданных на входы KP, KD и KDD;
0 – регулирование с использованием настроек,
поданных на входы KP, KD и KDD;
![]() 1 – вычисление настроек регулятора;
1 – вычисление настроек регулятора;
![]() 2 – сброс всех результатов вычислений (значения
настроек на выходах блока, критическая частота и амплитуда
генератора);
2 – сброс всех результатов вычислений (значения
настроек на выходах блока, критическая частота и амплитуда
генератора);
![]() 3 – сброс критической частоты и амплитуды;
3 – сброс критической частоты и амплитуды;
![]() 6 – непрерывное вычисление настроек регулятора с
плавным переходом от старых значений к новым. В этом режиме
определение текущих настроек и их введение в регулятор происходит
автоматически. Значения настроек постоянно индицируются на выходах
KP, KD, KDD;
6 – непрерывное вычисление настроек регулятора с
плавным переходом от старых значений к новым. В этом режиме
определение текущих настроек и их введение в регулятор происходит
автоматически. Значения настроек постоянно индицируются на выходах
KP, KD, KDD;
![]() 10 – регулирование с использованием вычисленных
настроек, сформированных на выходах KP, KD и
KDD;
10 – регулирование с использованием вычисленных
настроек, сформированных на выходах KP, KD и
KDD;
ZDN – задание регулятору;
INP – регулируемый параметр;
KP – коэффициент при пропорциональной составляющей;
KD – коэффициент при первой производной PDD-закона;
KDD – коэффициент при второй производной PDD-закона;
AMP – ограничения на амплитуды. Положительное значение – на амплитуду сигнала, добавляемого к выходу регулятора (по умолчанию 10, минимальная – 4), а отрицательное – на колебания выхода объекта (по умолчанию 1, минимальная – 0.5). При старте МРВ значение этого входа должно быть положительным (т.е. вход должен задавать ограничение амплитуды на входе объекта).
На выходах данного блока формируются следующие величины:
Q – величина управляющего воздействия;
KP – коэффициент при пропорциональной составляющей;
KD – коэффициент при первой производной;
KDD – коэффициент при второй производной;
STS – индикатор текущего состояния адаптации.
Величины, подаваемые на входы ZDN, INP и AMP, должны задаваться в процентах (в диапазоне от 0 до 100). Величина управляющего воздействия на выходе Q формируется в диапазоне от -100 до 100.
Описание работы блока
Если вход REG равен 0 или 10, блок реализует функцию обычного PDD-регулятора. В первом случае используются настройки, заданные входами блока KP, KD и KDD, а во втором – полученные на соответствующих выходах.
Для перехода в режим автонастройки (одноразовое определение оптимальных настроек регулятора) следует установить в 1 значение входа REG. Для перехода в режим непрерывной адаптации (постоянное определение оптимальных настроек регулятора) нужно на вход REG подать значение 6. В обоих случаях процесс управления объектом осуществляется параллельно с процессом настройки регулятора.
Работа алгоритма настройки основана на подаче на вход объекта пробного гармонического сигнала. Амплитуда колебаний выходного сигнала объекта по умолчанию удерживается в пределах от 0.3% до 1%. Верхний предел амплитуды колебаний может быть изменен подачей отрицательной величины на вход AMP. Абсолютное значение этой величины задает ограничение на амплитуду колебаний выхода объекта.
Критерием выбора настроек является минимизация среднеквадратичной ошибки регулирования. Получаемые настройки минимизируют колебания при переходных процессах.
Реализованный алгоритм является помехоустойчивым. Он работает даже в том случае, если дисперсия шума в несколько раз превышает амплитуду пробных колебаний выходного сигнала. При настройке алгоритм исключает появление неустойчивых режимов работы контура.
Быстродействие процесса самонастройки зависит от уровня шумов, неслучайных возмущений, действующих на объект управления.
Индикатором хода процесса настройки регулятора является величина выхода STS. Он может принимать следующие значения.
0 – настройка завершена (или не запускалась);
1 – настройка регулятора завершена успешно. Получены значения оптимальных настроек;
2…100 – поиск оптимальных настроек. Значение выхода уменьшается от 100 до 1 и показывает близость к завершению работы алгоритма;
101 – невозможно провести адаптацию. Слишком много воздействий на систему или уровень шумов сравним с амплитудой гармоники на выходном сигнале объекта. Следует уменьшить внешние воздействия или попробовать увеличить уровень максимально возможной амплитуды колебаний на выходе объекта;
102 – невозможно провести адаптацию. Не удается достигнуть необходимой амплитуды сигнала на выходе (от 0,3 до 1 максимальной). Следует увеличить амплитуду входа или уменьшить амплитуду выхода;
103 – невозможно провести адаптацию. Границы диапазона изменения управляющего сигнала не дают увеличить амплитуду сигнала на входе объекта. Следует либо изменить амплитуды, либо сместить уровень управляющего воздействия;
104 – невозможно провести адаптацию. Границы диапазона изменения регулируемого параметра не дают увеличить амплитуду сигнала на выходе объекта. Следует повысить ограничение на входную амплитуду или сместить входной сигнал с границ диапазона регулирования;
105 – невозможно провести адаптацию. Следует увеличить частоту пересчета программы.
В случае нормального завершения адаптации (значение 1 на выходе STS) на выходах KP, KD и KDD формируются новые значения настроек для регулятора. Для их использования надо присвоить новые значения соответствующим входам и задать входу REG значение 0. Для регулирования по полученным настройкам без присвоения их входам следует подать значение 10 на вход REG.
При задании жестких ограничений на амплитуду пробного сигнала алгоритм может сформировать сообщение о невозможности подобрать оптимальные настройки. Минимальное значение амплитуды следует устанавливать с учетом разрядности АЦП, коэффициента усиления и инерционности объекта.
В процессе адаптации значения настроек KDD и KD вычисляются по относительному времени – тактам вызова программы. Для использования настроек во внешних регуляторах необходимо привести их к реальной временной шкале. Значение периода вызова программы можно получить с помощью блока TSTEP.
Ограничения на применение
Данный алгоритм настройки PDD-регулятора не может быть применён к структурно неустойчивым объектам управления.
Оптимальные настройки вычисляются при соотношении времени запаздывания к постоянной времени объекта не более 0,5.
Период опроса параметра и вызова алгоритма настройки должна быть не менее 0.05 постоянной времени объекта.
Амплитуда колебаний регулируемого параметра (отклик на пробный сигнал) должна быть не ниже 8 единиц кода АЦП. Например, 0.5% для 12-разрядного АЦП составляет 20 единиц.
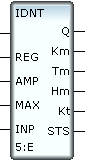
Этот блок по кривой отклика на прямоугольный импульс рассчитывает параметры модели инерционного звена первого порядка с запаздыванием.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и Adaptive Микро TRACE MODE в реальном времени.
Входы данного блока используются для следующих целей:
REG – управление идентификацией:
1 – начать идентификацию;
0 – остановить идентификацию;
AMP – задание амплитуды пробного импульса;
MAX – задание условия снятия пробного импульса. Когда абсолютная величина разности текущего и начального значений выхода объекта превышает значение MAX, пробный импульс снимается;
INP – на этот вход подается сигнал с выхода анализируемого объекта.
Выходы используются следующим образом:
Q – с этого выхода пробный импульс подается на вход объекта;
Km – вычисленный коэффициент усиления модели объекта;
Tm – вычисленная постоянная времени модели объекта;
Нм – вычисленное время запаздывания модели объекта;
Kt – вычисленный коэффициент прореживания. Указывает модальному регулятору, насколько реже следует формировать управляющее воздействие по сравнению с циклом опроса;
STS – текущее состояние:
![]() 101 – недостаточно информации для
идентификации;
101 – недостаточно информации для
идентификации;
![]() 102 – слишком большое несоответствие структуры
модели и объекта управления;
102 – слишком большое несоответствие структуры
модели и объекта управления;
![]() 103 – настройка не завершена. Сброс импульса
произведен по длительности. Следует увеличить период канала и
повторить процесс идентификации;
103 – настройка не завершена. Сброс импульса
произведен по длительности. Следует увеличить период канала и
повторить процесс идентификации;
![]() 2-100 – идентификация;
2-100 – идентификация;
![]() 1 – идентификация завершена успешно;
1 – идентификация завершена успешно;
![]() 0 – нет задания на идентификацию.
0 – нет задания на идентификацию.
Коэффициенты модели объекта Тm и Hm вычисляются в тактах пересчета. Для приведения их к реальной временной шкале надо использовать период вызова программы. Это значение можно получить с помощью блока TSTEP.
Описание работы блока
Для идентификации объекта управления необходимо задать амплитуду пробного импульса и условие его снятия.
Амплитуда пробного импульса может быть как положительной, так и отрицательной величиной. Ее следует задавать таким образом, чтобы модуль максимального значения выхода объекта был больше 4 (рекомендуемое значение - 100)
Условие снятия пробного импульса выбирается в соответствии с инерционностью объекта. Если задать его малым, то за время нарастания значения выхода объекта до указанной величины будет получено недостаточно точек для идентификации. Таких точек должно быть не менее 20.
Процесс идентификации нужно проводить на объекте в установившемся режиме, отключив регулятор. В противном случае вычисленная модель не будет адекватна объекту управления.
Для запуска идентификации надо присвоить входу REG значение 1. При этом на выход Q подается значение, заданное входом AMP. Когда абсолютная величина разности текущего и начального значений выхода объекта (выходное значение объекта поступает на вход INP) превышает значение MAX, пробный импульс снимается (Q=0). Пробный импульс снимается также в том случае, если в течение 20 тактов пересчета величина выхода объекта остается неизменной. Далее алгоритм анализирует отклик объекта после снятия пробного импульса. Когда значение выхода объекта становится меньше 3, формируются новые значения выходов Km, Tm, Hm и Kt.
За ходом процесса идентификации можно следить по значению выхода STS. Величина этого выхода устанавливается равной 100 после подачи на командный вход значения 1. Далее в ходе идентификации объекта его значение уменьшается до 1. Значение выхода, равное 1, является индикатором нормального завершения определения параметров объекта.
Для наиболее качественной идентификации объекта управления желательно проведение нескольких опытов при небольших отклонениях от рабочего режима, причем как на положительное приращение, так и на отрицательное с последующим усреднением коэффициентов модели.
Ограничения на применение
Данный алгоритм идентификации не может быть применен к объектам с сильно выраженными накопительными свойствами.
Чем менее инерционен объект, тем выше погрешность его идентификации.
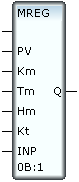
Этот блок представляет собой модальный регулятор с функцией вычисления настроек по параметрам объекта управления, что предполагает его совместное использование с блоком IDNT.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и Adaptive Микро TRACE MODE в реальном времени.
Входы этого блока имеют следующее назначение:
PV – задание регулятору;
Km – коэффициент передачи модели объекта;
Tm – постоянная времени модели объекта (в тактах пересчета);
Нm – время запаздывания модели объекта (в тактах пересчета);
Kt – коэффициент прореживания;
INP – регулируемая величина с максимальным значением от 4 до 100.
На выходе Q формируется управляющее воздействие.
Описание работы блока
По параметрам объекта, заданным на входах Km, Tm и Hm, вычисляются настройки модального регулятора с наблюдателем полного порядка. Наблюдатель осуществляет динамическую компенсацию запаздывания в объекте, что резко повышает качество управления. Чем меньше точность описания объекта и больше период квантования, тем менее качественно работает блок.
Регулятор переходит в ручной режим в случае равенства 0 входов Km, Tm и Hm одновременно. При этом на выход Q копируется значение задания регулятору (вход PV).
При значительном уровне шума схема модального регулятора обеспечивает фильтрацию шумовых составляющих в выходном сигнале при сохранении хорошей динамики отработки детерминированных возмущений.
Ограничения на применение
Регулятор используется только при известной математической модели объекта управления. Такая критичность вызвана тем, что выбор структуры регулятора полностью определяется имеющимся математическим описанием объекта.
Настройка PID-закона по параметрам объекта (CALC)
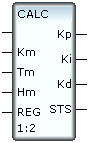
Этот блок рассчитывает коэффициенты PID-регулятора на основе параметров математической модели объекта первого порядка с запаздыванием.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и Adaptive Микро TRACE MODE в реальном времени.
Входы блока имеют следующее назначение:
Km – коэффициент усиления модели объекта;
Tm – постоянная времени модели объекта;
Hm – время запаздывания модели объекта;
Reg – выбор типа регулятора:
0 – PI-регулятор;
1 – PID-регулятор.
На входные параметры налагаются следующие требования:
![]() значения входов должны быть неотрицательны;
значения входов должны быть неотрицательны;
![]() коэффициент передачи и постоянная времени объекта
управления должны быть больше нуля;
коэффициент передачи и постоянная времени объекта
управления должны быть больше нуля;
![]() отношение запаздывания к постоянной времени должно
лежать в пределах от 0 до 2.
отношение запаздывания к постоянной времени должно
лежать в пределах от 0 до 2.
Выходы данного блока используются следующим образом:
Kp – коэффициент при пропорциональной составляющей;
Ki – коэффициент при интегральной составляющей;
Kd – коэффициент при дифференциальной составляющей;
STS – флаг ошибки входных параметров:
0 – входные данные удовлетворяют требованиям;
-1 – входные данные не удовлетворяют требованиям.
Постоянная времени и запаздывание объекта управления задаются в тактах пересчета. Пусть, например, постоянная времени объекта равна 5 с, а запаздывание – 2 с. Период пересчета примем равным 0.2 с. При этом значение входа Tm должно быть равным 5/0.2 = 25, а значение входа Hm – 2/0.2 = 10.
Настройка PID-закона по скачку сигнала задания (RJMP)
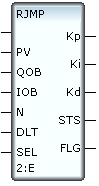
Этот блок вычисляет настройки ПИ/ПИД регулятора. Для этого он обрабатывает два массива данных: массив значений входа объекта и его выхода. Их накопление начинается при смене задания регулятора на величину, превышающую 6% (от этой величины зависит точность вычисления настроек регулятора). Накопление прекращается, когда объект перейдет в установившееся состояние. Это означает, что выход объекта заданное число раз (значение входа N) не отличается от задания на величину, заданную входом DLT.
Этот блок работает в отладчике программ инструментальной системы, а также под управлением Adaptive Control МРВ, Adaptive Control Double Force МРВ и Adaptive Микро TRACE MODE в реальном времени.
Входы блока имеют следующее назначение:
PV – задание. При его изменении более чем на 6% и FLG = 100 (установившееся состояние) начинается накопление массивов;
QOB – вход, контролирующий выход объекта управления;
IOB – на этот вход подается вход объекта управления (управляющее воздействие);
N – вход, задающий число тактов пересчета для определения установившегося состояния. По умолчанию (при равенстве входа 0) это число равно 60 (минимальное значение – 40);
DLT – вход, задающий максимальное отклонение выхода объекта от задания для определения установившегося состояния. По умолчанию (при равенстве входа 0) это значение равно 0.8 (максимальное значение – 5, минимальное – 0.1);
SEL – выбор типа закона: 1 - ПИД, 0 - ПИ;
Выходы данного блока используются следующим образом:
Kp – коэффициент при пропорциональной составляющей;
Ki – коэффициент при интегральной составляющей;
Kd – коэффициент при дифференциальной составляющей;
STS – флаг результата последней обработки массивов:
![]() 0 – обработка массивов остановлена
пользователем, т.е. в процессе обработки (значения от 99 до 1 на
выходе FLG) пользователь изменил задание;
0 – обработка массивов остановлена
пользователем, т.е. в процессе обработки (значения от 99 до 1 на
выходе FLG) пользователь изменил задание;
![]() 100 – успешное завершение обработки
массивов;
100 – успешное завершение обработки
массивов;
![]() 101 – большое запаздывание объекта, но можно
попытаться еще раз, минимизировав действие внешних возмущений в
момент накопления массивов и увеличив скачок задания;
101 – большое запаздывание объекта, но можно
попытаться еще раз, минимизировав действие внешних возмущений в
момент накопления массивов и увеличив скачок задания;
![]() 102 – много данных. Следует повторить настройку,
увеличив период опроса;
102 – много данных. Следует повторить настройку,
увеличив период опроса;
![]() 103 – мало данных. Следует повторить
настройку, уменьшив период опроса;
103 – мало данных. Следует повторить
настройку, уменьшив период опроса;
![]() 104 – отношение запаздывания к постоянной времени
объекта не входит в допустимый диапазон (от 0 до 2), но можно
попытаться еще раз;
104 – отношение запаздывания к постоянной времени
объекта не входит в допустимый диапазон (от 0 до 2), но можно
попытаться еще раз;
FLG – флаг установившегося состояния объекта:
![]() 0 – объект не в установившемся состоянии,
требуется либо дождаться этого состояния или скорректировать
значения входов N и DLT;
0 – объект не в установившемся состоянии,
требуется либо дождаться этого состояния или скорректировать
значения входов N и DLT;
![]() 100 – объект находится в установившемся состоянии,
скачок по заданию приведет к накоплению массивов и вычислению новых
настроек регулятора;
100 – объект находится в установившемся состоянии,
скачок по заданию приведет к накоплению массивов и вычислению новых
настроек регулятора;
![]() 99 … 0 – идет обработка накопленных массивов.
Значение 100 на этом выходе в момент переходного процесса
свидетельствует о накоплении массивов, и когда объект войдет в
установившееся состояние, значение входа будет уменьшаться до
нуля.
99 … 0 – идет обработка накопленных массивов.
Значение 100 на этом выходе в момент переходного процесса
свидетельствует о накоплении массивов, и когда объект войдет в
установившееся состояние, значение входа будет уменьшаться до
нуля.
Значения входов PV, QOB и IOB следует задавать в процентах.
Для получения более точных настроек следует проделать серию опытов по смене задания.
При смене задания в процессе накопления массивов данные продолжают накапливаться. Однако в этом случае коэффициенты регулятора не вычисляются.
Оптимальная обработка блоков в программе будет следующей: контроль выхода объекта, вычисление управляющего воздействия, пересчет.
Блок может использоваться и при ручном управлении объектом. В данном случае надо привести объект в установившееся состояние. Далее следует на входе PV установить значение входа QOB. Когда на выходе FLG появится 100, следует изменить задание и вручную подогнать объект к этому значению. После этого начнется обработка массивов и вычисление настроек регулятора.