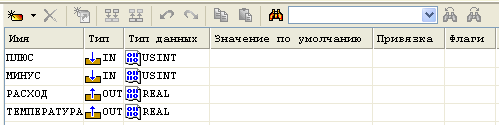
Далее приступим к созданию имитатора объекта участка термообработки. В слое Шаблоны_программ создадим программу Имитатор_Термообработки и зададим ей следующие аргументы:
Входные аргументы ПЛЮС и МИНУС – сигналы от ПДД-регулятора с ШИМ, а выходные аргументы РАСХОД и ТЕМПЕРАТУРА – соответственно расход теплоносителя и температура в аппарате. Построим математическую модель аппарата, основываясь на предположении, что его функционирование описывается классическим инерционным звеном первого порядка с запаздыванием. Исходя из постановки задачи, для создаваемой модели входным воздействием будет служить расход теплоносителя, выходным – температура в аппарате. Параметры объекта назначим следующими: коэффициент передачи (усиления) 2.5, постоянная времени 20 (в тактах пересчета), запаздывание 3 (в тактах пересчета), а также наложим на его выход гармонические и случайные помехи. В качестве языка программирования применим Техно FBD.
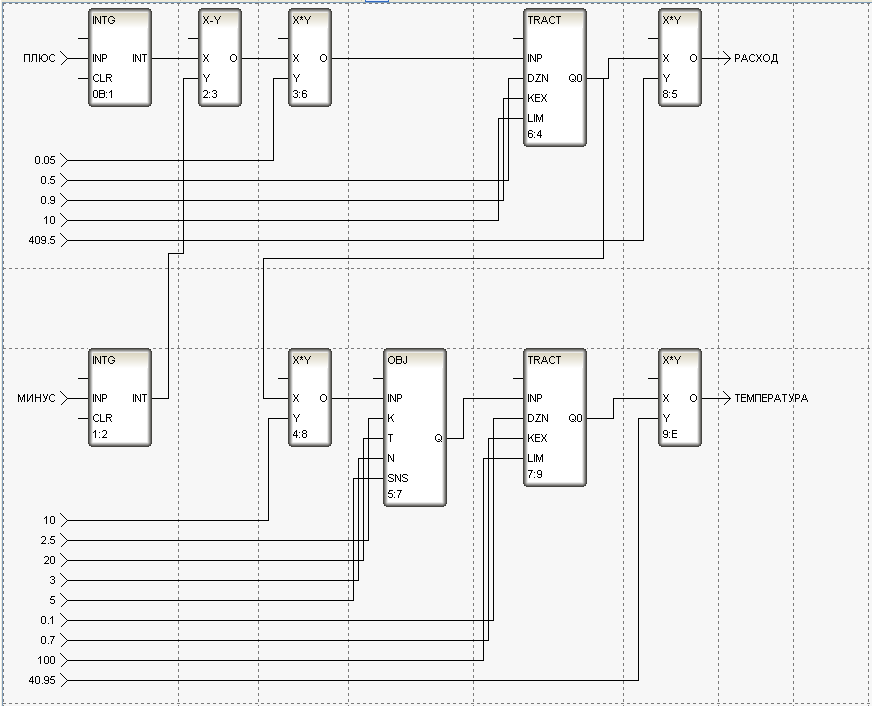
Функциональные блоки TRACT применены для сглаживания и ограничения формируемых выходных значений, а функциональные блоки умножения X*Y 8 и 9 – для приведения значений к выходному диапазону 12-ти разрядного АЦП. Откомпилируем созданную программу. Откроем дополнительное окно Навигатора проекта на группе Участок_Термообработки узла PC-based контроллера MicroRTM_2 и перетащим в него шаблон программы. Для созданного канала класса Вызов Имитатор_Термообработки выполним привязку атрибутов каналов к аргументам.

Для имитации расхода продукта создадим шаблон программы Имитатор_Расход_Продукта, для чего также воспользуемся языком Техно FBD. Аргументы программы определим как
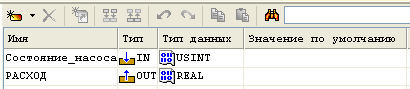
Случайную составляющую расхода будем формировать, используя центральную предельную теорему, из комбинации четырех генераторов случайных чисел в диапазоне (0,1) с равномерным распределением. Номинальное значение расхода зададим равным 50, а для плавного изменения в моменты включения/выключения дозирующего насоса применим функциональный блок переключения с динамической балансировкой – SSWT. Не забудем с помощью блока умножения X*Y привести выходное значение программы к диапазону 12-ти разрядного АЦП.
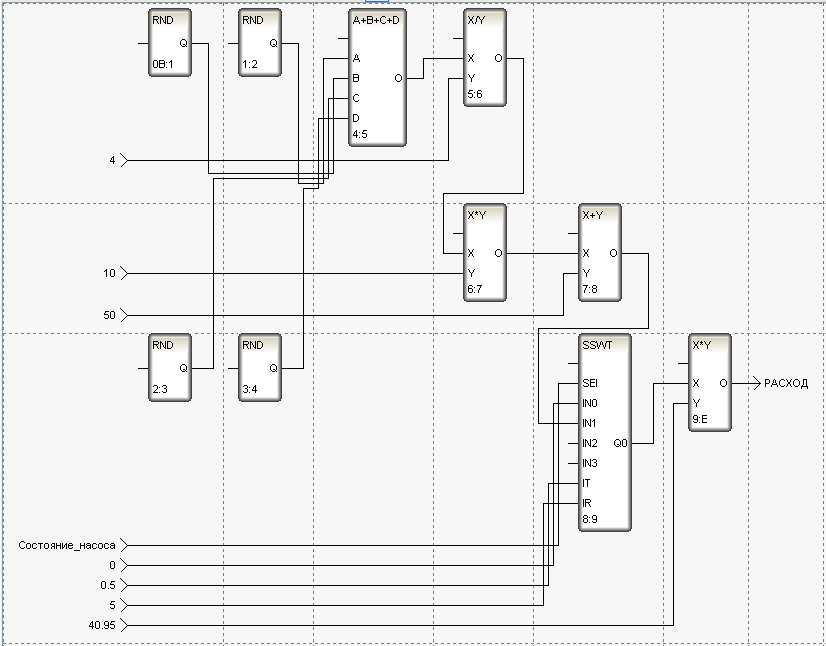
Откомпилируем программу. В дополнительном окне навигатора проекта выделим группу Участок_Дозирования узла MicroRTM_2 и перетащим в него шаблон программы. Для созданного таким образом канала класса Вызов Имитатор_Расход_Продукта выполним привязку атрибутов каналов к аргументам.

Так как от PLC - контроллера Siemens S7-200 поступают данные как аналоговые, так и дискретные, то для их имитации на АРМ создадим две соответствующие программы. Причем для каждого типа параметров создадим по одному экземпляру программы, а, варьируя значения аргументов, задаваемых как константы – в поле Значение по умолчанию табличного редактора аргументов, будем устанавливать величины параметров и их "случайные" флуктуации.
Создадим в слое Шаблоны_программ новую программу – Имитатор_УХ_Аналог. Объявим для нее аргументы:
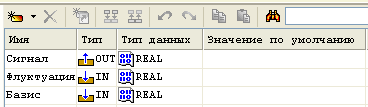
Программу разработаем на языке программирования Техно FBD.
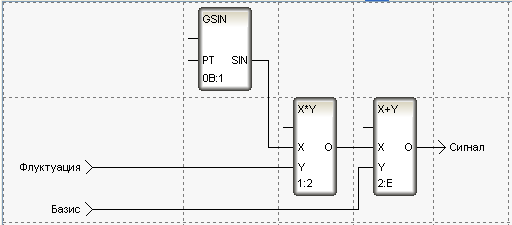
Изменяющийся по синусоидальному закону "случайный" компонент в диапазоне (-1,1) будем масштабировать, задавая аргумент Флуктуация, и добавлять к аргументу Базис, определяющему установившееся значение. Откомпилируем программу нажатием функциональной клавиши F7.
Для привязки разработанной программы выделим в окне Навигатора проекта группу Участок_Хранения узла RTM_1. Выделим канал Уровень и откроем его свойства. Во вкладке Информация определим свойство канала Вызов путем указания в диалоге шаблона программы Имитатор_УХ_Аналог.
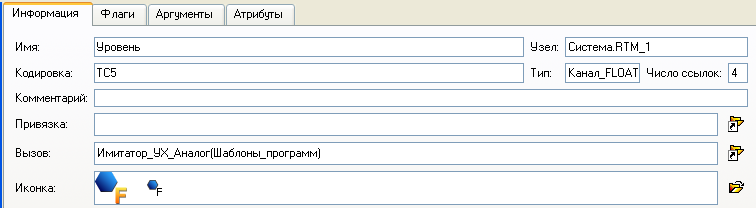
Перейдя в появившуюся после выполненного действия вкладку Аргументы, привяжем аргументы программы к атрибуту канала и зададим константы в столбце Значения по умолчанию.

Подобным образом поступим в отношении каналов Температура, Давление и Влажность, указав для них соответственно аргументы Флуктуация и Базис как (0.25,24), (0.025,0.98) и (0.2,70).
Для имитации дискретных сигналов создадим шаблон программы Имитатор_УХ_Дискрет со следующими аргументами:
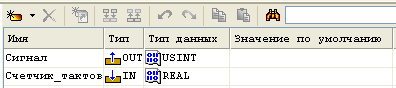
Разработанная на Техно FBD программа будет выглядеть так:
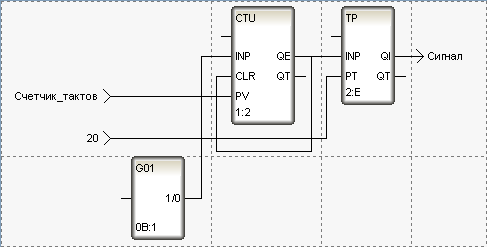
Данная программа будет периодически имитировать срабатывание дискретного датчика. Задавая входным аргументом Счетчик_тактов количество тактов, поступающих от генератора G01, до момента срабатывания датчика (установки триггера TP), при его достижении выходной аргумент Сигнал будет удерживаться в состоянии 1 в течение последующих 20 тактов, затем произойдет сброс его в состояние 0, а далее картина будет повторяться. После компиляции программы выделим канал Дверь в группе Участок_Хранения узла RTM_1 и в бланке Информация определим свойство Вызов следующим образом:
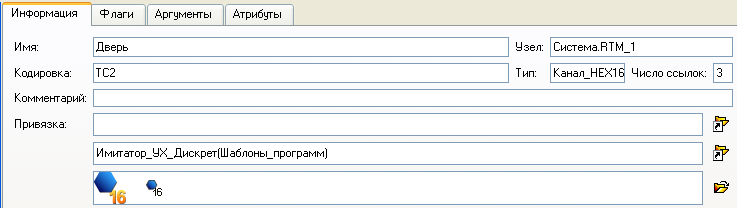
Во вкладке Аргументы свяжем выходной аргумент программы с атрибутом Реальное значение текущего канала и зададим период "срабатывания" датчика в качестве значения по умолчанию:

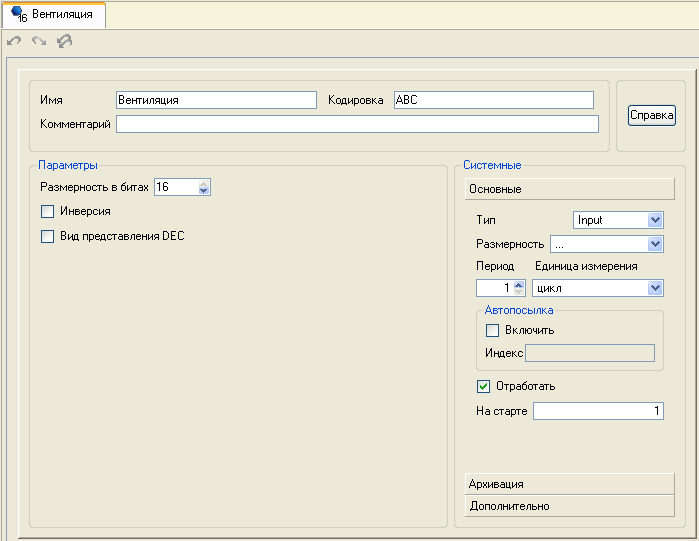
Для канала Пожарная_сигнализация поступим аналогичным образом, определив для него периодичность срабатывания как 1000. В отношении канала Вентиляция поступим несколько иначе – зададим ему постоянное значение, соответствующее включенному состоянию системы вентиляции:
Таким образом, разработанный в предыдущих главах проект системы автоматизации, доступен для запуска и отладки, причем все внешние сигналы заменены имитаторами.
Сохраним созданный проект на диск с именем
DEMO_PRJ.prj и, затем, с помощью
щелчка ЛК мыши на иконке  панели
инструментов создадим файлы для загрузки на целевые платформы для
проведения отладки проекта.
панели
инструментов создадим файлы для загрузки на целевые платформы для
проведения отладки проекта.