straton Runtime with Real Time Kernel (RTK) |
|
Manual -> straton Runtime (Soft PLC) -> straton Runtime with Real Time Kernel (RTK) |
straton Runtime with Real Time Kernel (RTK) |
|
Manual -> straton Runtime (Soft PLC) -> straton Runtime with Real Time Kernel (RTK) |
The straton RTK (Realtime Kernel) is the straton Runtime system for hard realtime. With that highest determinism and failure safety towards the operating system are guaranteed.
The straton RTK can only be started with the straton Runtime Manager (flag Hard realtime has to be activated) or or in a DOS-Shell/BAT-file.
Attention:Only one instance of the straton RTK can be started at a time.
The straton RTK is only available for the Windows operation systems XP (XPe) and VISTA.
The Realtime Kernel is designed, so that it triggers the straton Runtime cycle independent of Windows. So the straton Runtime cycle is guaranteed to be executed deterministically. Cycle times must be 100 µs or higher.
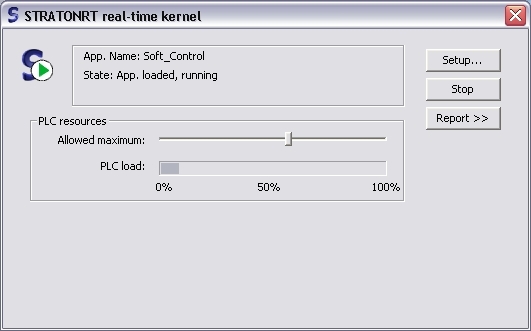
The PC's part of the calculating capacity can be set with a slider.

Depending on the size of the PLC application and the defined cycle time the slider has to be adjusted to the PLC load. The slider can be set between 10% and 85%. The current load (bar) indicates whether the allowed maximum for executing the PLC cycle is sufficient.
If the bar is near 100%, there is a danger of cycle overflows! In this case set the slider higher (towards 85%). If this is not possible because of the applications in Windows (e.g. bad picture opening times of zenon) the cycle time of the straton application has to be increased.
|
|
|
If the bar reaches the 100% mark, there is a danger of cycle overflows! |
|
|
|
Slider at 10%, cycle time 10ms:
Slider at 50%, cycle time 5ms:
Slider at 85%, cycle time 20ms:
The following formula can be used to find out, if the setting of the slider does not lead to cycle overflows in combination with the cycle time: cycle time > (100 / Sliderposition [%] ) * calculating time In order to find out the calculating time of the PLC cycle, click Shift+Alt+A and note the value Max. Cal. Time [µs].
Assumption: Max. cal. time: 274µs Slider position: 50% Set cycle time: 1ms (1000µs) Calculation: (100/50)*274 = 548µs This means that the defined cycle time of 1 ms is sufficient. |
|
|
|
Please keep in mind: If you do not stick to the described formula, the determinism which is based in the cycle time is not given anymore! |
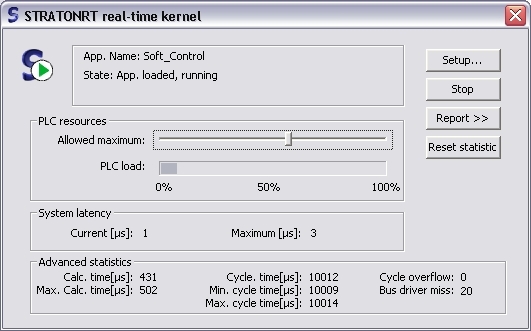
Description of the displayed measuring values (show with ALT+S resp. SHIFT+ALT+A):
|
System latency (Alt+S) |
|
|
Current [µs] |
Current system latency (see also Runtime cycle) |
|
Maximum [µs] |
Maximum system latency (since the start of the Runtime) |
|
Extended statistic (Shift+Alt+A) |
|
|
Cal. time [µs] |
Current calculation time of the last cycle |
|
Max. cal. time [µs] |
Maximal calculation time for a PLC cycle (since the the start of the Runtime) |
|
Cycle time [µs] |
Current cycle time |
|
Min. cycle time [µs] |
Minimal cycle time (since the start of the Runtime) |
|
Max. cycle time [µs] |
Maximal cycle time (since the start of the Runtime) |
|
Cycle overflow [1] |
Counter for cycle time exceedance (since the start of the Runtime) |
|
Driver overflow [1] |
Counter for failed PLC cycles of Windows (non-realtime) drivers (since the start of the Runtime) |
The value of the cycle time can always only be a multiple of the HAL Timer Periode (time basis). The time basis depends on the selected timer and its time basis (see also straton RTK configuration). That means: A set cycle time of 10 ms of a hardware with a time basis of 122 µs is not executed with exactly 10,000 ms but with 10,004 ms.